

Estimation of Skeletal Muscle Activity
and Neural Model of Spinal Cord Reflex
HPCI Strategic Program Field 1 Supercomputational Life Science

Information Science and Technology, The University of Tokyo
Yoshihiko Nakamura
(field1- Program3)
We have been developing an “Inverse system” [1] , which is a technology for estimating information in the human body from dynamics and feedback [2][3] based on an efficient computation of a rigid body system that was developed in the field of robotics. That is, we are trying to take a look at the information in the body by extraneous measurement and computation.
We conducted a project known as CREST, “Creating the Brain” (Research Supervisor: Prof. Shunichi Amari), from 1998 to 2003, and started research to generate and control a body movement pattern of humanoid robots by attracting symbolic nonlinear dynamics. Meanwhile, we developed a parallel computing method called Assembly and Disassembly Algorithm, in which O (log N) is usable for calculation, as a direct dynamics computing method [4], and we took a cue from that and started to compute human systemic skeletal musculature as a physics model. In the model, 997 wires are used to link a systemic skeletal system with 155 degrees of freedom [5]. It became one of the major projects through two Grants-in-Aid for Scientific Research (S): “Deployment of Dynamics-Based Information Processing Model of Intelligence” (2003 to 2007), and “Establishing Human-Machine Communication through Kinesiology and Linguistic Integration” (2008 to 2012).
Estimation starts with calculating the force applied to the skeleton with mass (the entire mass of the human body is allocated to the skeleton) from geometric information about motion, which is measured by motion capture, by a calculation scheme of inverse dynamics. The next computation is back calculation of systemic muscular tension expressed in the wire model without mass. There is an inequality constraint that the wire tension shall be positive or zero. The solution of a problem having high redundancy, 155 < 997, is explored as a secondary programming problem. In order to take the activity of antagonist muscles into account, wireless electromyography is attached to the body during motion capture, and muscle activities of up to 32 channels are measured. In the optimization problem, the secondary programming problem is solved using examples from the activity (Fig. 1).
Then, our interest was directed towards the deeper part of the body and construction of an inverse model for estimating nervous activity from muscle activity, and we are now studying the motor portion of the nervous system from the spinal cord toward the periphery. The spinal nerve consists of total 31 pairs of peripheral nerves emerging from the spinal cord (8 pairs of cervical nerves, 12 pairs of thoracic spinal nerves, 5 pairs of lumbar nerves, 5 pairs of sacral nerves and a pair of coccygeal nerves). As each nerve branches into an anterior branch and dorsal branch, the spinal nerve branches into 124 nerve fascicles. The function of skeletal muscle, to which each nerve fascicle projects, was clarified. The 124 nerve fascicles are supposed to represent the same number of signal pathways for estimating their activities. We placed a totally-coupled mathematical neural network in the spinal cord, and made it learn by activity of the nerve fascicles and voluntary signals (in which various hypotheses are used) descending from the brain. The spinal neural network obtained this way is regard as an optimized nerve system specialized in the anatomical body model and movement pattern typically found in humans, and represents the reflex arc by the spinal cord (Fig. 2).
Strategic Program, Program 3: In a hierarchical integrated simulation for predictive medicine (represented by Shu Takagi), a high-dimensional systemic neuromusculoskeletal system and its parallel computation algorithms are being developed by creating a model, in which the mass is dispersed among muscles and viscera, and computing the stress distribution of contraction and contact associated with elastic deformation. By integrating the multi-scale model from the muscle fibers of skeletal muscle studied by the Takagi Group and the basal ganglion model by the Doya Group, we are now aiming, for example, to duplicate a mechanism for altered dopamine metabolism in basal ganglions in Parkinson disease as altered motion in walking and reaching. In this way, we are going to establish basic computational technologies for predictive medicine helpful in drug discovery, diagnosis and treatment.
 |
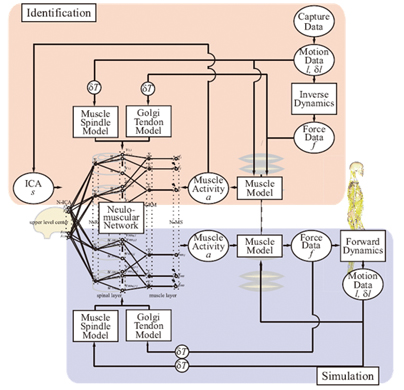 |
Fig. 1: Visualization of muscle activity |
Fig 2 : Composition of spinal cord reflex model |
[References]
[1] |
M. Kaneko and T. Kodama, Inverse system Disclosure of the mechanisms of market and life, Iwanami Shinsho (New red cover 875), 2004 |
[2] |
A. Murai, K Yamane, and Y. Nakamura.Modeling and identification of human neuromusculoskeletal network based on biomechanical property of muscle. Proceedings of the 30th IEEE EMBS Annual International Conference, Vancouver, Canada, 2008. |
[3] |
A. Murai, K Yamane, and Y. Nakamura. Effects of nerve signal transmission delay in somatosensory reflex modeling based on inverse dynamics and optimization. Proceedings of the 32nd IEEE International Conference on Robotics and Automation, pp. 5076- 5083, 2010. |
[4] |
K. Yamane and Y. Nakamura. “Efficient Parallel Dynamics Computation of Human Figures”. Proceedings of IEEE International Conference on Robotics and Automation (ICRA2002), 1:530-537, Washington D.C., May, 2002. |
[5] |
Y. Nakamura, K. Yamane, Y. Fujita, and I. Suzuki. Somatosensory computation for man-machine interface from motion capture data and musculoskeletal human model. IEEE Transactions on Robotics, 21:58-66, 2005. |
BioSupercomputing Newsletter Vol.6
- SPECIAL INTERVIEW
- Development of New Fluid-structure Interaction Analysis (ZZ-EFSI) Resulting in Rapid Achievement of High Operation Performance
Research Associate Professor, School of Engineering, The University of Tokyo Kazuyasu Sugiyama - Interview with High-performance Computing Team Members: Continued Efforts in Tuning to Harness the Potentials and the High Capability of the K Computer
Group Director of Computational Molecular Design Group,
Quantitative Biology Center, RIKEN
Makoto Taiji
Senior Researcher of High-performance Computing Team,
Integrated Simulation of Living Matter Group,
Computational Science Research Program, RIKEN
Yousuke Ohno
Senior Researcher of High Performance Computing Development Team,
High Performance Computing Development Group,
RIKEN HPCI Program for Computational Life Sciences
Hiroshi Koyama
Researcher of High-performance Computing Team,
Integrated Simulation of Living Matter Group,
Computational Science Research Program, RIKEN
Gen Masumoto
Research Associate of High-performance Computing Team,
Integrated Simulation of Living Matter Group,
Computational Science Research Program, RIKEN
Aki Hasegawa
- Report on Research
- Functional Analysis of Multidrug Efflux Transporter AcrB by All-Atom Molecular Dynamics Simulation
Graduate School of Nanobioscience,
Yokohama City University
Tsutomu Yamane,
Mitsunori Ikeguchi
(Molecular Scale WG) - Multi-scale Modeling of the Human Cardiovascular System
Computational Science Research Program,
RIKEN Liang Fuyou (Organ and Body Scale WG) - Toward a spiking neuron-level model of the early saccade visuomotor system
Kyoto University Jan Moren
Nara Institute of Science and Technology Tomohiro Shibata
Okinawa Institute of Science and Technology Kenji Doya
(Brain and Neural Systems WG) - Developing the MD Core Program for Large Scale Parallel Computing
Computational Science Research Program,
RIKEN Yousuke Ohno (High-performance Computing Team)
- SPECIAL INTERVIEW
- Pioneering the Future of Computational Life Science toward Understanding and Prediction of Complex Life Phenomena
Program Director of RIKEN HPCI Program for Computational Life Sciences
Toshio Yanagida
Deputy- Program Director of RIKEN HPCI Program for Computational Life Sciences
Akinori Kidera
Deputy- Program Director of RIKEN HPCI Program for Computational Life Sciences
Yukihiro Eguchi
- Report on Research
- Free Energy Profile Calculations for Changes in Nucleosome Positioning with All-Atom Model Simulations
Quantum Beam Science Directorate, Japan Atomic Energy Agency
Hidetoshi Kono, Hisashi Ishida, Yoshiteru Yonetani, Kimiyoshi Ikebe (Field 1- Program 1) - Estimation of Skeletal Muscle Activity and Neural Model of Spinal Cord Reflex
Information Science and Technology, The University of Tokyo
Yoshihiko Nakamura (Field1 - Program 3)
- Report
- ISLiM Interim Accomplishment Meeting in 2011
Computational Science Research Program, RIKEN Eietsu Tamura - Computational Life Sciences Classes Held in High Schools
HPCI Program for Computational Life Sciences, RIKEN
Chisa Kamada, Yasuhiro Fujihara, Yukihiro Eguchi